Step Motor Nedir?
Step motorlar elektrik enerjisini dönme hareketi ile fiziksel enerjiye çeviren elektromekanik aygıtlardır. İsimlerinden de anlaşıldığı üzere adım adım hareket eden motorlardır. Biraz daha detaylı olarak açıklayacak olursak, girişlerine uygulanan pals sinyallerine karşı analog dönme hareketi çıkışı üreten, bu dönme hareketini adım adım ve çok hassas kontrolle sağlayan sabit mıknatıs kutuplu motorlardır. Step motorların yapıları rotor, stator ve rulmanlardan oluşmaktadır. Rulmanlar, rotora bağlı şaftın rahat hareket etmesini sağlarlar. Statorun birden fazla kutbu vardır. Kutup sayısı motordan motora değişmektedir ancak genellikle bu sayı sekizdir. Kutupların polaritesi elektronik anahtarlar vasıtasıyla sürekli değişir. Rotorun mıknatıslığı ya sabit mıknatıs ile ya da dış uyarım teknikleri ile meydana getirilir.
Step Motor
Step Motor
Step Motor Çalışma Prensibi
Step motorun çalışma prensibi ile şu şekildedir: Elektronik anahtarlar vasıtasıyla bobinlere enerji verilir ve rotor, üzerinde enerji olan bobinin karşısına geçerek durur. Motorun ne kadar çok dönmesi isteniyorsa bobinlere sırasıyla o kadar pals sinyali verilir. Bu dönme açısı step motorda değişkendir ve tercih yaparken çok kritik bir parametredir.
Step Motor Çalışma Prensibi
Step Motor Çalışma Prensibi
Step motorların avantajları: Çok hassas pozisyon ve hız kontrolü, düşük devirde yüksek tork.
Step motorların dezavantajları: Verim, geribildirim mekanizması barındırmadığından harici konum limitlemeye gerek duyması.
Step Motorun Adım Açısının ve Adım Sayısının Hesaplanması
360° dönen step motorlarda gerekli adım açısının (Qs) bulunması için faz sayısını (Ns) ve motordaki rotorun çıkıntılı kutup sayısını (Nr) bilmek gerekir.
Adım sayısının (S) hesaplanması için bir adımın açısını (Qs) bulmak yeterli olacaktır.
Step Motor Çeşitleri
Step motorlar yapılarına göre beşe ayrılırlar.
Sabit mıknatıslı step motorlar (PM)
Değişken relüktanslı step motorlar (VR)
Hibrit step motorlar (HB)
Hidrolik step motorlar
Lineer step motorlar
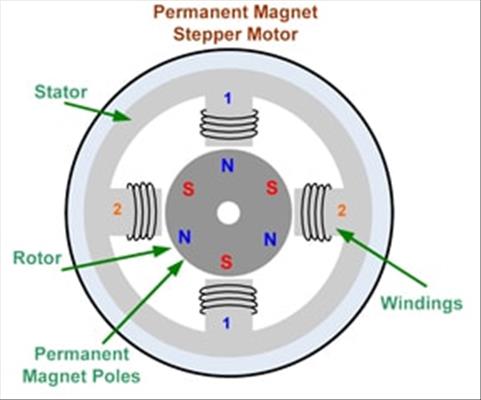
Sabit Mıknatıslı Step Motorlar (PM)
PM (Permanent Magnet Stepper Motors) motorların yapılarında rotorda sabit mıknatıslar bulunur. Stator bobinlerine uygulanan gerilime ve akımın yönüne göre motorun dönmesi gerçekleşir. Bu tip motorlardaki rotorlarda bulunan mıknatıslar, manyetik akının artmasını sağlarlar. Stator bobinlerindeki akım arttıkça manyetik alan, buna bağlı olarak tork da artar. Sabit motorlu step motorlar, değişken relüktanslı step motorlara göre daha yüksek torklarda çalışırlar.
Sabit Mıknatıslı Step Motor Yapısı
Sabit Mıknatıslı Step Motor Yapısı
Sabit mıknatıslı step motorlar kendi içlerinde dörde ayrılırlar:
İki fazlı sabit mıknatıslı iki fazlı step motor
Orta uçlu sargılara sahip sabit mıknatıslı step motor
Disk tipi sabit mıknatıslı step motor
Dört fazlı sabit mıknatıslı adım motor
İki fazlı step motorlarda iki farklı bobin sarım tipi vardır:
Unipolar Step Motor:
Unipolar step motorlar tek yönlü beslemeye sahip olup akımın tek yönde iletildiği motorlardır. Bu tip motorlarda 4 bobin bulunur. Unipolar motorların kablolarındandan birisi ortak uç (negatif) olarak kullanılır. Kolay sürülebilmelerine karşın her bir adımda sadece fazlardaki sarımların yarısı aktif olacağından sağlayacağı maksimum tork elde edilemez.
Bipolar Step Motor:
Bipolar motorların sarımlarında ortak uç bulunmaz ve her fazı ayrı ayrı sürmek gerekir. İki yönlü beslenirler ve akım her iki yönden de akar. Daha karmaşık sürücü yapısına ihtiyaç duymalarına karşın, her fazdaki sarımların tamamı kullanıldığından motorun verebileceği torkun tamamı kullanılabilir.
Değişken Relüktanslı Step Motorlar (VR)
Değişken relüktanslı step motorlar en temel ve en basit step motor tipidir. Sabit mıknatıslı step motorlarda olduğu gibi bu motorlarda da en az dört kutuplu stator bulunmaktadır. Sabit mıknatıslı değil, mıknatıslanabilen çok kutuplu malzemelerden yapılmış rotorlar bulunur. Değişken relüktanslı step motorların başlangıç, durma ve dönme adımları sabit mıknatıslı step motorlardan daha hızlıdır. İki tip değişken relüktanslı step motor vardır: